Discontinued On Mar. 2015
FZM1 Series
Vision Sensors for Positioning

High speed and Precise Positioning
* Information in this page is a reference that you created on the basis of information in the product catalog before the end of production, may be different from the current situation, such as goods for / supported standards options / price / features of the product. Before using, please check the compatibility and safety system.
Related Contents
last update: February 28, 2013
Vision - tailored for pick & place
The Omron Vision Sensor FZM1 is optimized to detect in high speed and high accuracy the position and orientation of any object inside a machine. This helps to increase the production efficiency.
New generation image processing technologies and an intuitive user interface optimized for positioning applications. High speed communication via EtherCAT or UDP enables an easy interworking with motion components from Omron and other vendors. This increases the overall performance from positioning through control.
(Precise) Stable Measurements Under Changing Conditions
More-robust operation means less stopping for detection mistakes and increased yield.
This more than meets on-site needs and increases system performance.

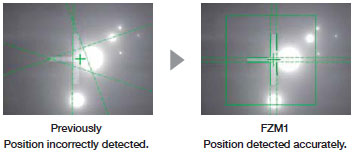
[Detecting Alignment Marks with Light Interference]
Highest Detection Performance in the Industry
Optimized processing items for positioning have been included to handle a wide range of measurement objects.
Just select the right processing item for the target object to enable stable inspection without complicated calculations and settings.
Positioning with Alignment Marks
The alignment marks commonly used in manufacturing of LCD panels and PCBs can be precisely detected.
Accurate detection is possible even if the marks are dirty or partially hidden.
Positioning with Corner Detection
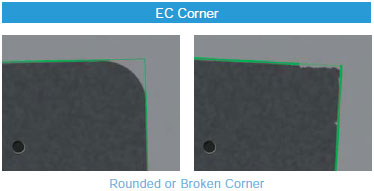
Positioning can be performed by detecting a corner of the measurement object. Now, stable detection is possible even for rounded corners or when the edge is broken. This is ideal for glass plates, LCDs and other objects on which alignment marks cannot be printed.
Positioning by Shape of object
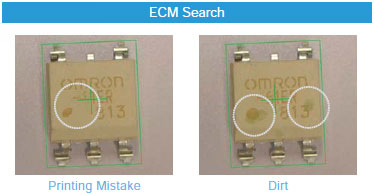
When picking electronic components or food items, unclear printing and dirt can make stable inspections impossible. FZM1 can identify the position and orientation of objects from their shapes. The use of ECM search processing enables precise position and attitude measurements without being affected by surface conditions.
Superior Performance Under Severe Conditions
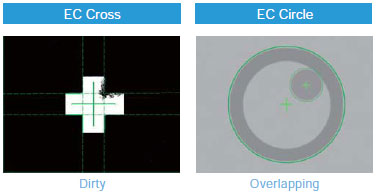
EC: Edge Code
Image Processing Technique
patent number 11-550303
Conventional search processing and pattern matching detect objects based on density differences or feature points registered on model images. This produced unstable detection when the measurement object was changed or the shape was not consistent.
With EC image processing, the measurement object is recognized as a geometric shape to minimize offsets in the detection position caused by light interference or dirt. This achieves stable, accurate position detection.
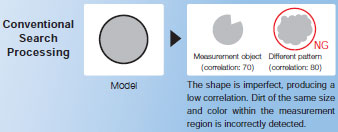

Changes in brightness are recognized as an edge code and geometric calculations determine the center of the circle and circumference edge. Even if the circle is broken, it is recognized as a circle, i.e., as the measurement object.
Dirt and other abnormalities in the measurement region are differentiated so that they are not falsely detected.
(Easy) Get Relief from the Difficulties of Positioning
[Wiring and Design] Next-generation High-speed Communications with EtherCAT
Support for the EtherCAT open network enables realtime remote I/O control. Connect to OMRON PLCs or other EtherCAT components through EtherCAT communications to perform high-speed motion control.
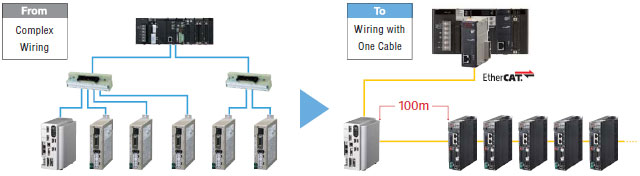
Less Wiring with Ethernet Cables
All trigger inputs and result outputs are performed using only an Ethernet cable. This eliminates wasted wiring work and helps prevent wiring mistakes when launching the system. With EtherCAT you can wire up to 100 m without a repeater to easily connect to Vision Sensors and Servo Drives.
Reduced Ladder Programming
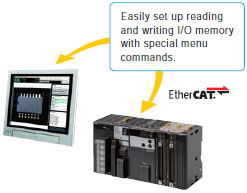
The PLC Link function communicates using three link areas: the command area, response area, and data output area.The PLC can control communications with the sensor simply by reading and writing words allocated in the I/O memory in the PLC. This greatly reduces the amount of ladder programming required for communications.
What is EtherCAT?
EtherCAT is an open network based on Ethernet that enables realtime control. It is ideal for machine-control networks that include motion control.
EtherCAT provides the operating principles and architecture required to achieve ultra-high-speed sync control and a bus topology that provides wiring efficiency. It solves the traditional complex wiring problems of Ethernet, which required many hubs and switches. OMRON applies EtherCAT to the high-speed, high-precision machine control networks required in FA sites, and will be releasing more EtherCAT products in the future.
[Camera Adjustments] Focus and Aperture Adjustments
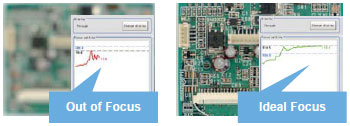
Focus and brightness, which use to be adjusted based on experience and instinct, have been expressed numerically and displayed in graphs so that you can literally see them.
The ideal focus and aperture can be adjusted quickly by essentially anyone. Variations between different operators are eliminated and greater inspection precision can be achieved.
[Coordinate Conversions] Simple Auto Calibration
The Vision Sensor provides a coordinate conversion function for different stages and robots. Coordinates can be converted for the Vision Sensor and output device without troublesome calculations.
Handles Various Stages and Robots

Flexible Camera Mounting
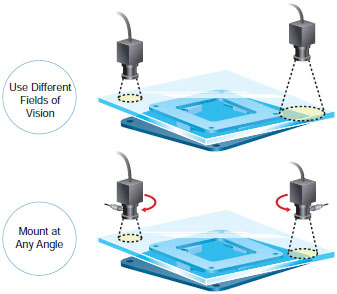
There are no Camera mounting restrictions even with alignment systems that use two Cameras. Differences between Camera angles and fields of vision can be calculated and coordinates converted without performing complex calculations in a PLC or other external device.
Easy Setup and configuration by an Application Wizard
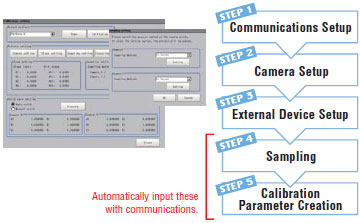
Calibration between the Cameras and stage or robot can be easily set up using a wizard. Simply select the type of inspection to easily generate the calibration parameters. Automatically input sampling data from an external device via EtherCAT or UDP to eliminate mistakes that can occur in manual input. Fine-tuning can also be quickly and accurately performed for production changes or adjustments of the setup is required on-site.
(Fast) Faster Image acquisition and Processing
A Lineup of High-speed Cameras
The speed of capturing images by a 0.3-megapixel Camera has been greatly increased.Even with a 2-megapixel Camera, the image capturing speed is equivalent to that of a standard 0.3-megapixel Camera.The difference is most obvious in applications requiring a wide field of vision, high precision, and high speed.

ECM Searches at 20 Times the Speed
The FZM1 provides an advanced version of OMRON's unique high-speed search processing, ECM. High-speed search processing is now possible for multiple measurement objects that are conveyed in different orientations. This enables high speed pick-and-place processing for moving objects.
[Search Speed for Rotated Objects]

* Individual workpieces under OMRON test conditions.
last update: February 28, 2013
 Product Category
Product Category
- Sensors
-
Vision Sensors / Machine Vision Systems
-
Discontinued
- FZM1 Series
-
Discontinued
-